Counting, Heatmaps, and Speed Estimation
Three of the most common downstream pipelines — and the geometry behind them.
Most production computer vision systems aren't model.predict(). They're an object tracker plus a small piece of geometry: a line that objects cross, a polygon that defines a zone, a calibration that turns pixel velocity into meters per second. Build these once with Track mode and you can adapt them to almost any vertical.
Implement line-crossing counting, zone occupancy, and a basic speed estimate from tracking output.
Line crossing — track centroid moves from one side of a line to the other → +1.
Zone occupancy — point-in-polygon test on each tracked object → who's currently inside.
Speed — pixel displacement / time / pixels-per-meter → m/s.
Hands-on
Link to this sectionLine-crossing counters#
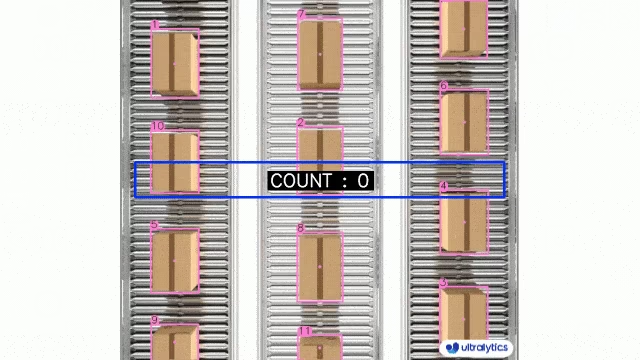
The simplest "people in / people out" counter. Define a line; count when an object's centroid crosses it.
from collections import defaultdict
from ultralytics import YOLO
from ultralytics.solutions import ObjectCounter
model = YOLO("yolo26n.pt")
counter = ObjectCounter(
model="yolo26n.pt",
region=[(20, 400), (1080, 400)], # the line
classes=[0, 2], # person and car only
show=True,
)
for r in model.track("input.mp4", stream=True, persist=True):
counter.process(r.orig_img)
print(f"In: {counter.in_count}, Out: {counter.out_count}")The trick: a single line is a 2D segment. Direction is determined by which side of the line the track was on previously vs currently.
Link to this sectionZone occupancy#
A polygon zone — count how many objects are inside it right now. The region counting guide ships a ready-made implementation if you'd rather not roll your own.
from shapely.geometry import Polygon, Point
zone = Polygon([(100, 100), (500, 100), (500, 400), (100, 400)])
for r in model.track("input.mp4", stream=True, persist=True):
inside = 0
for box in r.boxes:
if box.id is None:
continue
x1, y1, x2, y2 = box.xyxy[0].tolist()
cx, cy = (x1 + x2) / 2, (y1 + y2) / 2
if zone.contains(Point(cx, cy)):
inside += 1
print(f"frame {r.path}: {inside} inside zone")Link to this sectionSpeed estimation#
Speed = pixel displacement between frames × calibration factor / frame interval. For real geographic scales, pair this with distance calculation.
The calibration factor (pixels-per-meter) depends on camera angle and is the messy part. Three options, in increasing accuracy:
- Static field-of-view assumption — assume a known average ground-plane scale. Fine for rough speeds.
- Marker calibration — measure a known length in the scene (a parking line, sign, lane width) and compute pixels per meter from it.
- Homography — full 4-point ground-plane mapping. Most accurate; needed when the camera is angled.
from collections import defaultdict
from ultralytics import YOLO
model = YOLO("yolo26n.pt")
prev_centers: dict[int, tuple[float, float]] = {}
fps = 30
pixels_per_meter = 50 # measured: 50 px = 1 m on the ground plane
for r in model.track("input.mp4", stream=True, persist=True):
for box in r.boxes:
tid = int(box.id) if box.id is not None else None
if tid is None:
continue
x1, y1, x2, y2 = box.xyxy[0].tolist()
cx, cy = (x1 + x2) / 2, (y2) # bottom-center is closer to ground plane
if tid in prev_centers:
px, py = prev_centers[tid]
dx, dy = cx - px, cy - py
dist_m = (dx ** 2 + dy ** 2) ** 0.5 / pixels_per_meter
speed_ms = dist_m * fps
print(f"track {tid}: {speed_ms:.1f} m/s")
prev_centers[tid] = (cx, cy)The geometric center moves up when an object grows (gets closer to the camera). The bottom-center approximates the foot — which is on the ground plane. Speed estimates from bottom-center are far more stable.
Link to this sectionSmoothing#
Single-frame speed estimates are noisy. Average over a window:
from collections import deque
speed_window: dict[int, deque] = defaultdict(lambda: deque(maxlen=10))
# inside the loop:
speed_window[tid].append(speed_ms)
smoothed = sum(speed_window[tid]) / len(speed_window[tid])A 10-frame window (~0.3s at 30fps) hides per-frame jitter without lagging too much.
Link to this sectionHeatmaps#
Heatmaps accumulate object positions over time into a 2D occupancy grid. Useful for spotting hot zones.
import numpy as np
heatmap = None
for r in model.track("input.mp4", stream=True, persist=True):
h, w = r.orig_img.shape[:2]
if heatmap is None:
heatmap = np.zeros((h, w), dtype=np.float32)
for box in r.boxes:
x1, y1, x2, y2 = map(int, box.xyxy[0].tolist())
heatmap[y1:y2, x1:x2] += 1Visualize with a colormap or overlay on a static frame. Adjacent solutions like workouts monitoring and a Streamlit live inference UI use the exact same building blocks.
Implement a line-crossing counter for vehicles in any traffic video using the object counting helper or your own loop. Sanity-check the count against your eyes for a one-minute clip. The number should match within ±2.
You have a working line-crossing counter on a real video.
You understand why bottom-center is the right pixel for speed estimation.
You've computed a calibration factor (pixels per meter) for at least one scene.
One model, one stream — tractable. Many streams in parallel and the thread-safe inference discipline — that's the next lesson.